Week 2:WSL、Ubuntu 与 ROS2 环境配置
实验内容
本周完成了以下任务:
- 安装 WSL Ubuntu 22.04
- 配置 ROS2 Humble 环境
- 运行 turtlesim 小乌龟节点
实验截图
Ubuntu 安装成功
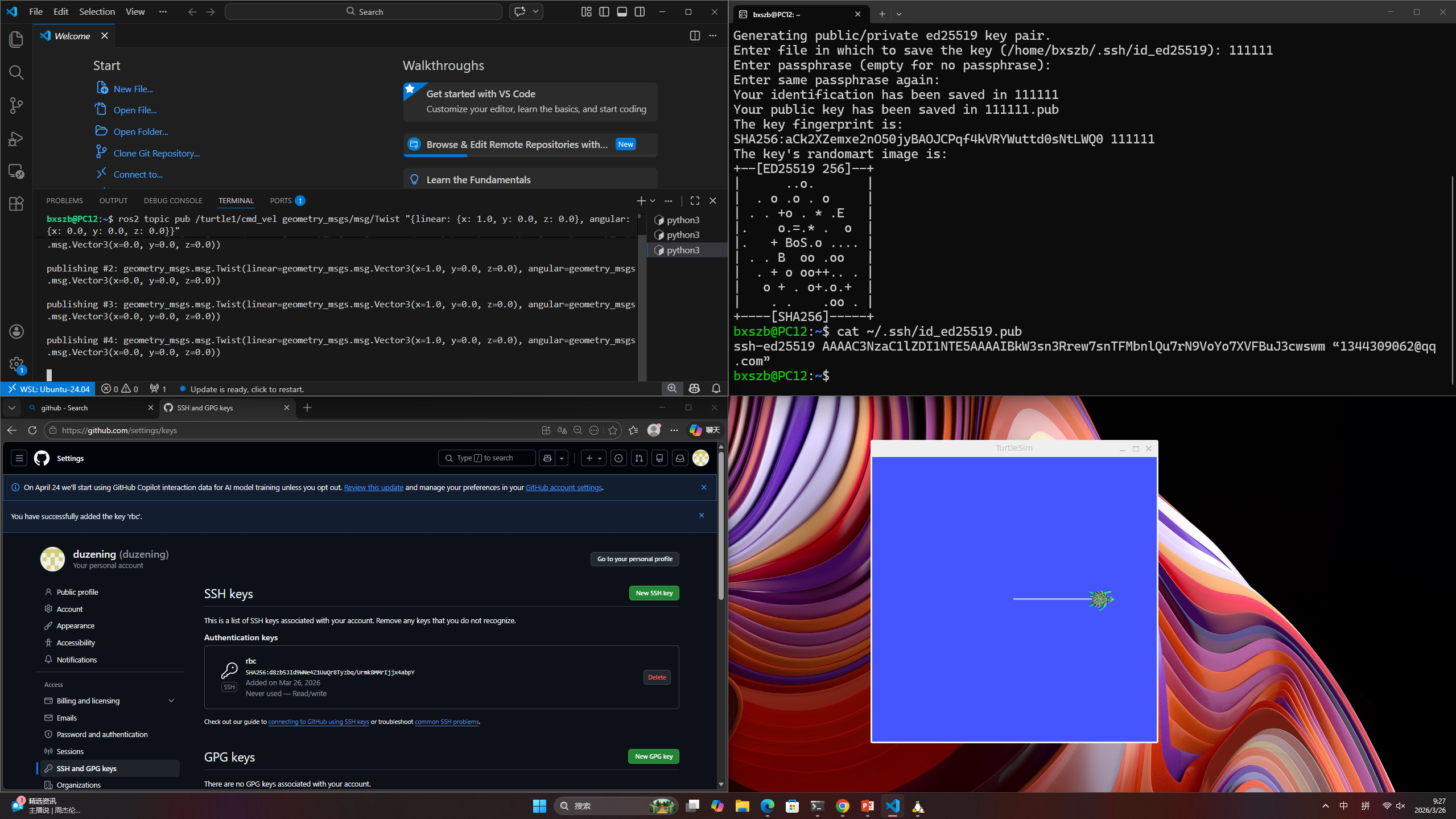
小乌龟仿真运行
运行命令
```bash
启动小乌龟节点
ros2 run turtlesim turtlesim_node
启动键盘控制
ros2 run turtlesim turtle_teleop_key ```
遇到的问题
- 问题:运行
ros2命令提示 command not found 解决:运行source /opt/ros/humble/setup.bash
学习心得
通过本周学习,我掌握了 WSL 的基本使用和 ROS2 的安装配置…
返回
1.win 商店下载ubuntu系统 2.排除wsl配置错误 3.设置账户名密码进入系统 安装ros2,运行脚本,跑验证的小乌龟ros程序 第二周主要完成了基于 Windows 环境的 ROS2 开发平台搭建工作。首先,通过 Windows 商店成功下载安装了 Ubuntu 子系统,并对 WSL 运行过程中出现的配置问题进行了排查与修复,确保系统能够稳定运行。随后,在 Ubuntu 环境中完成了用户账户与密码的初始化设置,顺利进入 Linux 系统。在此基础上,按照官方流程安装了 ROS2(Humble 版本),并通过运行相关安装与配置脚本完成环境搭建。最后,通过运行经典的 turtlesim 小乌龟示例程序,对 ROS2 的安装结果进行了验证,实现了节点启动与键盘控制小乌龟运动,表明整体环境配置成功