第二周进一步完善了开发环境与工具链的配置。首先,在 Ubuntu 环境中完成了 GitHub SSH 密钥的生成与配置,实现了通过命令行与远程仓库的安全交互,并掌握了基本的 Git 操作指令,如代码克隆(git clone)、添加文件(git add)、提交记录(git commit)以及推送到远程仓库(git push),能够完成基础的版本管理流程。
同时,完成了 VS Code 与 WSL Ubuntu 的连接配置,通过安装相关插件实现了在 Windows 环境下直接访问与编辑 Linux 子系统中的文件,提高了开发效率。在 ROS2 方面,成功运行 turtlesim 小乌龟节点,并通过命令行进行节点控制与交互。此外,还使用 Python 编写简单程序,实现了对小乌龟运动的控制
好的,我帮你把两段总结里的图片路径全部统一替换为 ros2小乌龟画圈.png 👇
Week 3:Python编程与机器人控制入门
实验内容
本周完成了以下任务:
- 学习Python基础(数据类型、函数、类、控制流等)
- 掌握ROS2 Python库(rclpy)基本使用
- 编写第一个ROS2 Python节点(Hello World)
- 实现小乌龟直行与速度控制
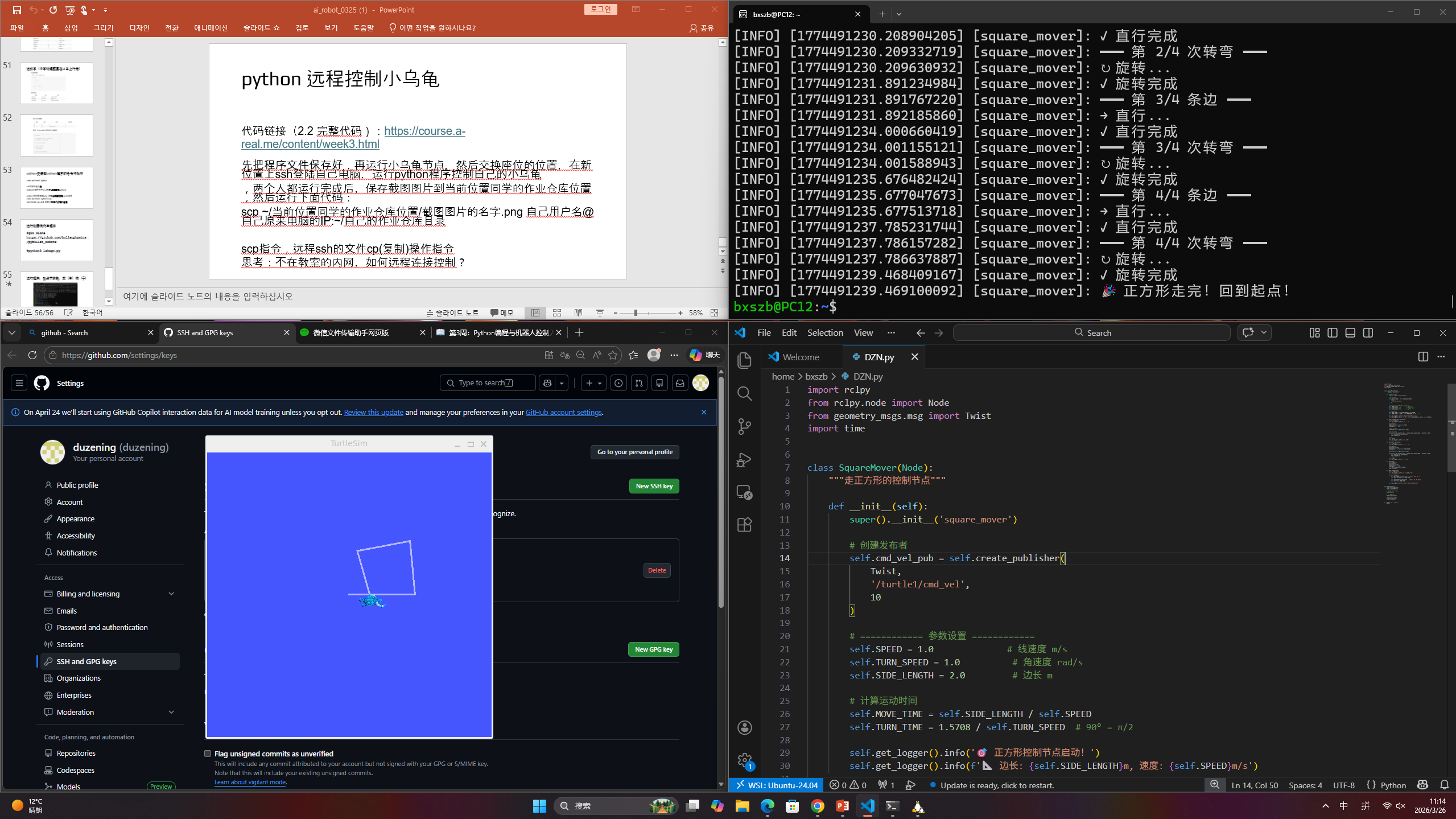
- 实现机器人走正方形轨迹
- 了解PyBullet 3D仿真环境(拓展内容)
实验截图
Hello World 节点运行
小乌龟直行控制
小乌龟走正方形
运行命令
# 运行Python节点
python3 hello_node.py
# 启动小乌龟仿真
ros2 run turtlesim turtlesim_node
# 运行直行控制节点
python3 straight_mover.py
# 运行正方形控制节点
python3 square_mover.py
遇到的问题
-
问题:Python节点无法运行或无输出 解决:检查是否执行
rclpy.init()和rclpy.spin() -
问题:小乌龟不运动 解决:确认是否持续发布
/turtle1/cmd_vel话题 -
问题:运动轨迹不准确 解决:调整速度与时间参数(距离/速度)
学习心得
本周重点学习了Python基础和ROS2 Python开发方法,掌握了节点的基本结构(初始化、发布、定时器等)。通过控制小乌龟完成直行和正方形运动,加深了对速度控制和时间计算的理解。同时初步接触了3D仿真工具PyBullet,对机器人仿真有了更直观的认识。
返回
Week 3(拓展):机器人仿真与智能控制
实验内容
本周拓展完成了以下内容:
- 学习 PyBullet 仿真环境基础
- 运行3D物理仿真(地面 + 球体)
- 实现简单机器人(小车)运动控制
- 了解 RosClaw 与 OpenClaw 集成
- 学习自然语言控制机器人流程
- 了解2D与3D机器人运动差异
实验截图
PyBullet 3D仿真界面
机器人小车运动
自然语言控制流程
运行命令
# 安装 PyBullet
pip install pybullet
# 运行基础示例
python3 pybullet_demo.py
# 运行强化学习环境示例
python3 -m pybullet_envs.examples.enjoy_TF_AntBulletEnv
# 启动 OpenClaw(Docker)
docker compose up -d
# 启动 ROS2 WebSocket
ros2 launch rosbridge_server rosbridge_websocket_launch.xml
遇到的问题
-
问题:PyBullet无法打开GUI窗口 解决:检查是否在本地环境运行(WSL需配置图形支持)
-
问题:机器人不运动 解决:确认是否正确调用
setJointMotorControl2 -
问题:自然语言控制无响应 解决:检查 WebSocket 地址和API Key配置
学习心得
通过本部分学习,我从2D小乌龟仿真扩展到了3D机器人仿真,理解了物理引擎在机器人中的作用。同时接触了AI控制机器人(RosClaw + OpenClaw),对智能机器人系统有了更整体的认识。