Week4
第四周主要学习计算机与机器人基础概念,包括命令行的本质、程序运行原理、网络通信(IP、SSH)以及 Linux 权限与目录结构等内容。同时介绍了 Git 与 GitHub 的原理,并完成 Python 环境配置及简单仿真实验(如机器狗仿真),提升对软件运行机制与机器人系统的整体理解。
下面是帮你整理好的 Week 4 实验报告结构(已保持和前面完全一致风格,并统一图片路径)👇
Week 4:机器人运动学基础(二维)
实验内容
本周完成了以下任务:
- 学习二维坐标系基本概念(世界坐标系、机器人坐标系)
- 理解坐标变换原理
- 掌握里程计(Odometry)基本原理
- 学习ROS2中里程计数据获取方法
- 进行Turtlesim运动学实验(位置与角度变化)
- 掌握差速驱动机器人运动学公式
- 编写节点读取机器人位置信息
- 了解简单3D运动学仿真(PyBullet拓展)
实验截图
坐标系与位置示意
Turtlesim位姿变化
里程计数据输出
运行命令
# 启动小乌龟
ros2 run turtlesim turtlesim_node
# 键盘控制
ros2 run turtlesim turtle_teleop_key
# 查看位姿(里程计)
ros2 topic echo /turtle1/pose
# 查看odom话题(真实机器人)
ros2 topic echo /odom
# 运行位置读取节点
python3 pose_reader.py
遇到的问题
-
问题:看不懂坐标变化 解决:结合小乌龟运动观察 x、y、θ 的变化
-
问题:角度单位不理解 解决:明确 θ 使用弧度(rad),90° ≈ 1.57 rad
-
问题:里程计数据复杂 解决:重点关注 position 和 orientation
学习心得
本周重点学习了机器人运动学基础,理解了坐标系(世界坐标与机器人坐标)的区别以及里程计的作用。通过Turtlesim实验直观观察位置与角度变化,加深了对运动学公式的理解。同时掌握了ROS2中获取位姿数据的方法,为后续路径规划和导航打下基础。
返回
Week 4(拓展):运动学与3D机器人理解
实验内容
本周拓展学习了以下内容:
- 理解差速驱动机器人运动学模型
- 掌握线速度与角速度计算关系
- 学习位置更新公式(x, y, θ)
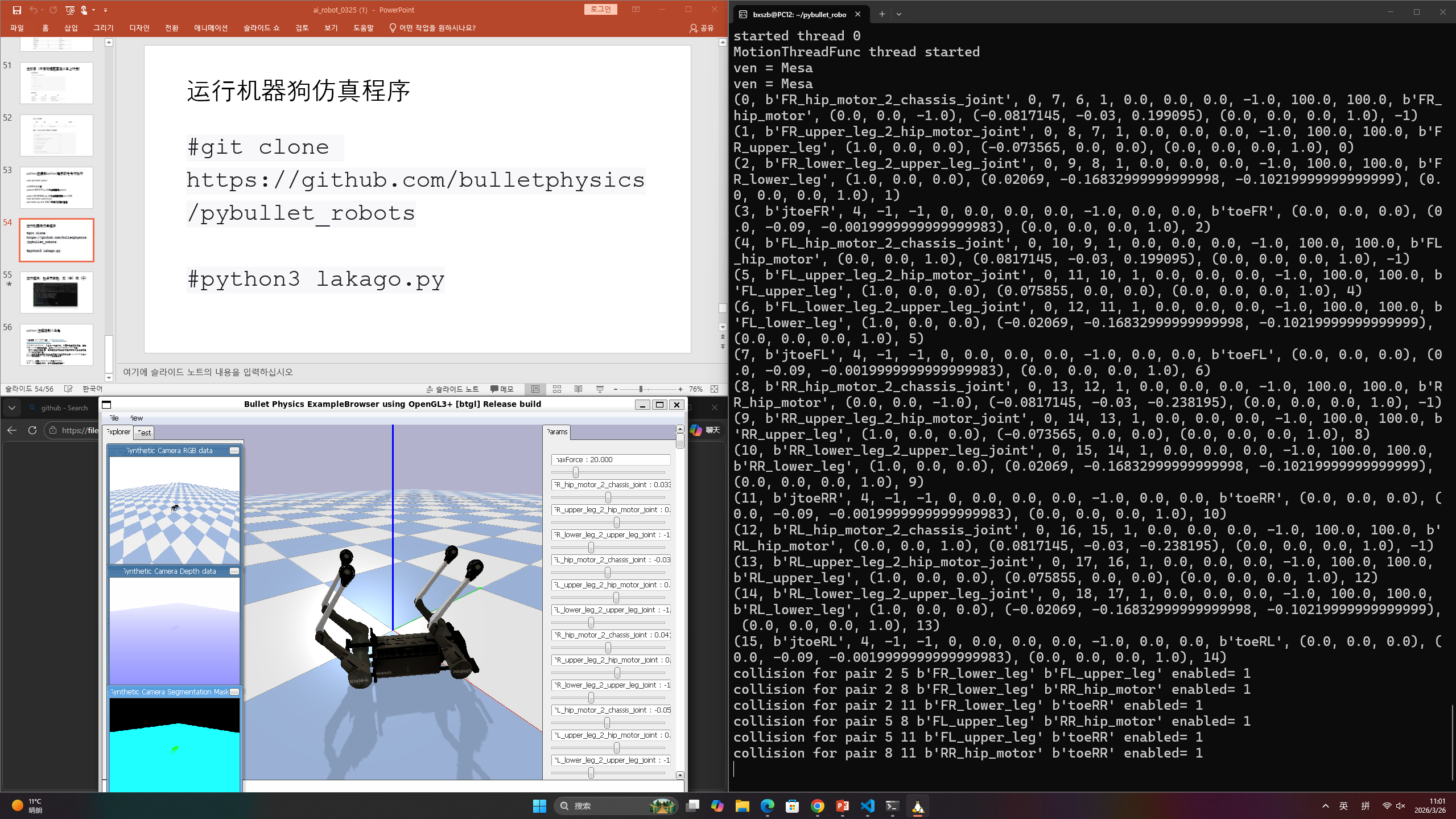
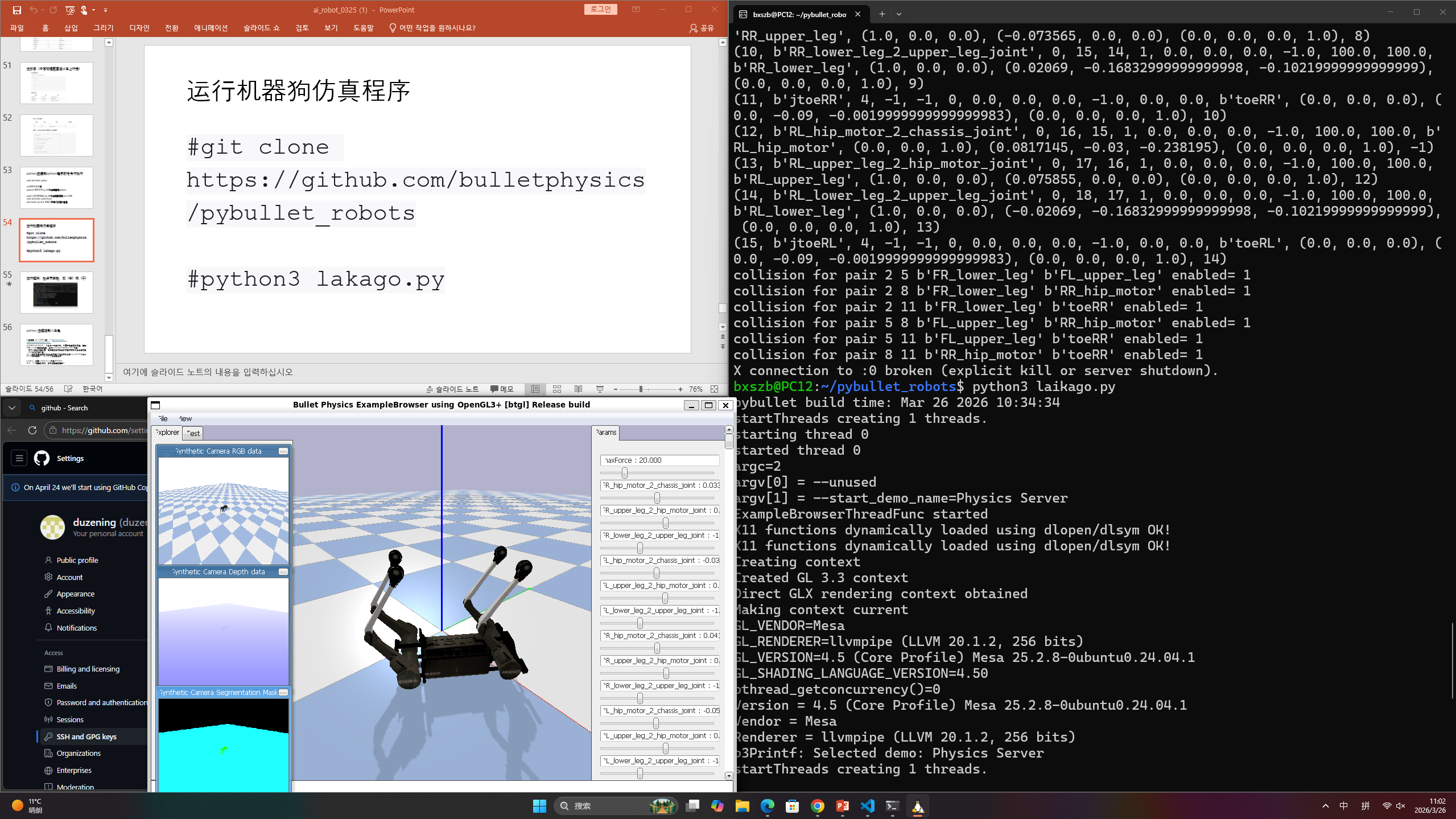
- 使用 PyBullet 进行3D运动演示
- 初步了解正运动学与逆运动学
- 理解机器人自由度(DOF)概念
实验截图
运动学轨迹演示
PyBullet机器人运动
机械臂运动示意
运行命令
# 运行PyBullet仿真
pip install pybullet
python3 pybullet_kinematics.py
# 运行里程计读取节点
python3 pose_reader.py
遇到的问题
-
问题:运动轨迹计算不准确 解决:检查速度和时间参数计算是否正确
-
问题:无法理解正/逆运动学 解决:通过机械臂示例(手臂运动)理解
-
问题:3D仿真不直观 解决:多观察不同速度组合产生的轨迹变化
学习心得
通过本周拓展学习,我从简单的2D运动进一步理解了机器人运动学本质,包括速度分解和位置更新。同时接触了正运动学与逆运动学的概念,以及自由度的定义,对机器人运动控制有了更系统的认识,也为后续学习机械臂和3D控制打下基础。