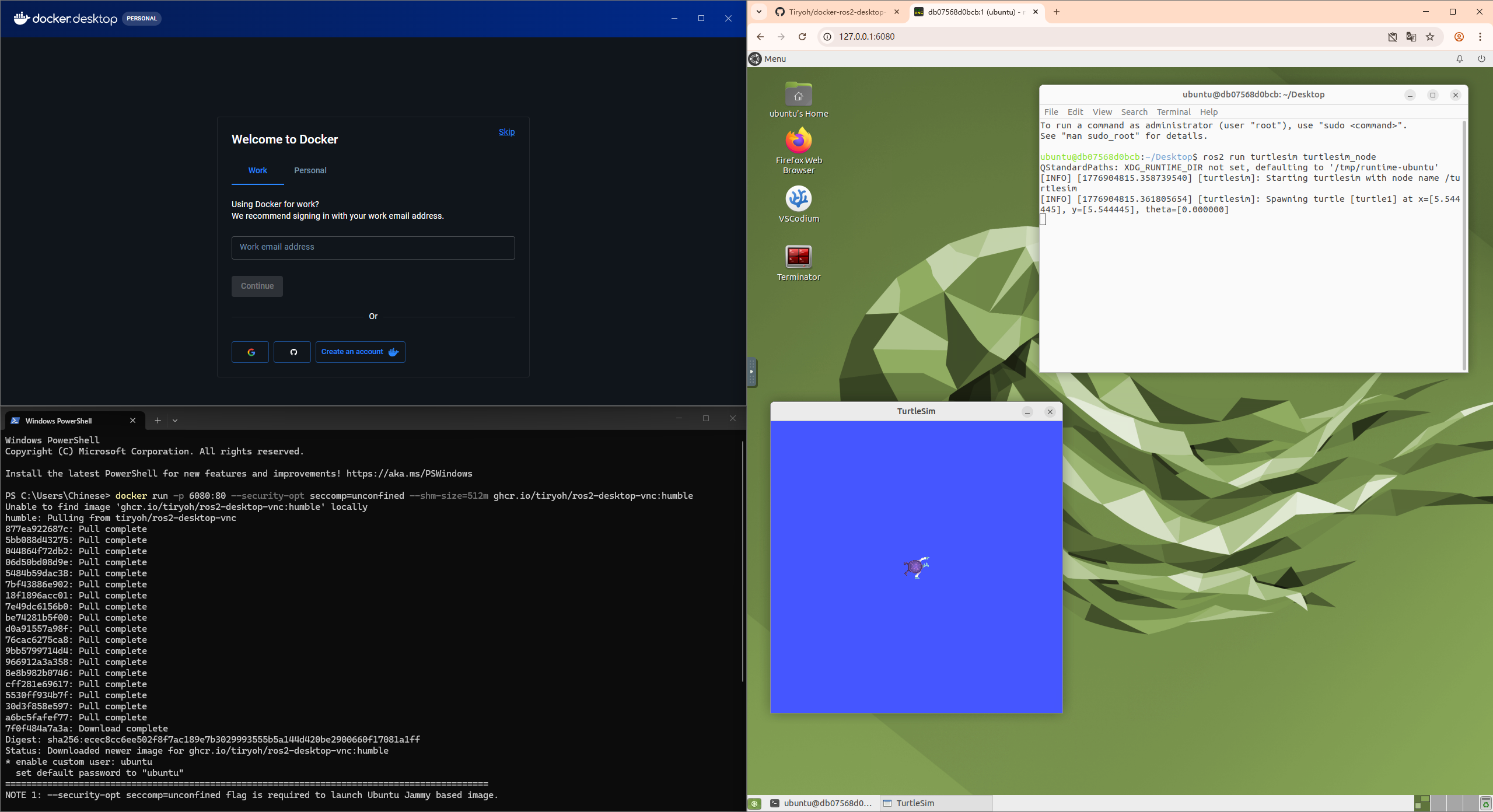
docker win docker mac docker 运行ros2 显示隐藏文件,找到ProgramData目录 删除DockerDesktop文件夹 浏览器打开 http://127.0.0.1:6080/ 运行小乌龟的ros2节点(注意在docker镜像中ros2 已经安装好了)
Week 8:Docker 与 ROS2 桌面环境
实验内容
本周完成了以下任务:
- 安装 Docker(Windows / Mac)
- 使用 Docker 运行 ROS2 桌面环境
- 通过浏览器访问 ROS2 图形界面
- 在容器中运行 turtlesim 小乌龟节点
实验截图
ROS2 桌面环境(浏览器访问)
小乌龟仿真运行
运行命令
```bash
运行 ROS2 桌面容器(参考项目)
docker run …
浏览器访问
http://127.0.0.1:6080/
启动小乌龟
ros2 run turtlesim turtlesim_node
键盘控制
ros2 run turtlesim turtle_teleop_key 遇到的问题 问题:Docker Desktop 无法启动 解决:确认 WSL2 已安装并正常运行 问题:首次运行镜像下载过慢 解决:更换网络或使用镜像加速 问题:浏览器无法访问界面 解决:确认容器运行成功,并访问 127.0.0.1:6080 学习心得
通过本周学习,我掌握了 Docker 的基本使用,并成功在容器中运行 ROS2 桌面环境。理解了 Docker 可以统一运行环境,减少系统差异,方便 ROS2 项目的部署与复现。
返回
← 返回首页